Baking 3D Textures: Point Clouds and Brick Maps
May 2004 (Revised December 2005)
![]()
Baking 3D Textures: Point Clouds and Brick MapsMay 2004 (Revised December 2005) |
|
The purpose of this application note is to provide recipes and examples for baking and reusing general 3D textures in Pixar's RenderMan (PRMan). The approach described herein is general and can be used to bake data such as diffuse color, highlights, direct and indirect illumination, ambient occlusion, etc.
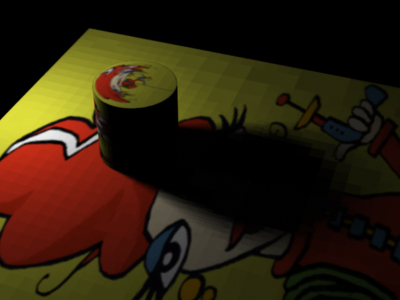
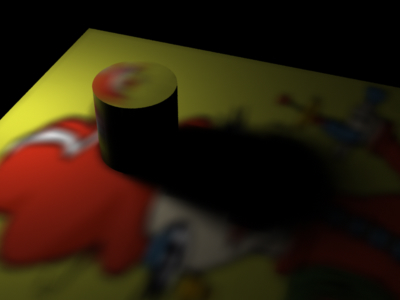
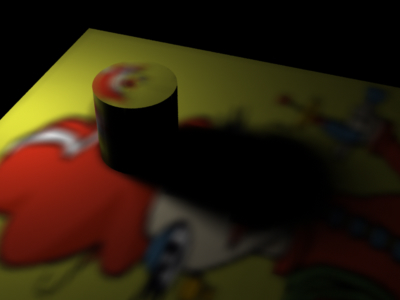
The primary example used below is baking light from an area light source; the light illuminates a simple scene consisting of a cylinder and a plane. Since the soft shadows from an area light source are rather slow to compute, it is appealing to compute and bake it only once and then reuse it for many subsequent renderings. In another example, we bake illuminated surface colors.
bake3d(filename, displaychannels, P, N, "radius", r, "coordsystem", cs,
"interpolate", 0,
"direct", d, "onebounce", ob, "occlusion", occ, ... );
The displaychannels parameter is a string consisting of a comma-separated list of channel names. Each channel name must be specified in the RIB file. For example:
DisplayChannel "color direct"
DisplayChannel "color onebounce"
DisplayChannel "float occlusion"
The corresponding displaychannels is the string "direct,onebounce,occlusion".
If N is (0, 0, 0) the data points are considered spheres instead of oriented disks.
When the optional parameter "radius" is omitted, PRMan automatically computes a radius that corresponds to the size of a shading micropolygon. If the radius is set to 0, the data are considered infinitely small points instead of disks (or spheres).
When "interpolate" is 0, the actual points P are baked. This can result in "overlapping" points at shading grid edges. If "interpolate" is 1, the point positions, normals, radii, and data are interpolated from four shading points. This can be used to bake out micropolygon midpoints rather than the actual shading points, to avoid overlapping points at shading grid edges.
surface
bake_direct_irrad(string filename = "", displaychannels = "";
float interpolate = 1)
{
color irrad;
normal Nn = normalize(N);
/* Compute direct illumination (ambient and diffuse) */
irrad = ambient() + diffuse(Nn);
/* Store in point cloud file */
bake3d(filename, displaychannels, P, Nn, "interpolate", interpolate,
"_irradiance", irrad);
Ci = irrad * Cs * Os;
Oi = Os;
}
The RIB file looks like this:
FrameBegin 0
Format 400 300 1
ShadingInterpolation "smooth"
PixelSamples 4 4
Display "bake_arealight" "it" "rgba"
Quantize "rgba" 255 0 255 0.5
DisplayChannel "color _irradiance"
Projection "perspective" "fov" 25
Translate 0 -0.5 8
Rotate -40 1 0 0
Rotate 20 0 1 0
Attribute "trace" "bias" 0.0001
WorldBegin
Attribute "cull" "hidden" 0 # don't cull hidden surfaces
Attribute "cull" "backfacing" 0 # don't cull backfacing surfaces
Attribute "dice" "rasterorient" 0 # view-independent dicing !
Attribute "visibility" "int diffuse" 1 # make objects visible to rays
Attribute "visibility" "int specular" 1 # make objects visible to rays
LightSource "spherelight" 1 "from" [-2.8 2 0.5] "radius" 0.2
"intensity" 2 "samples" 64 "falloff" 1
Sides 1 # to avoid flipping normals in "spherelight"
# Ground plane
AttributeBegin
Surface "bake_direct_irrad" "filename" "area_illum_plane.ptc"
"displaychannels" "_irradiance"
Scale 3 3 3
Polygon "P" [ -1 0 1 1 0 1 1 0 -1 -1 0 -1 ]
AttributeEnd
Attribute "visibility" "int transmission" 1 # the cyl. casts shadow
Attribute "shade" "transmissionhitmode" "primitive"
# Cylinder with cap
AttributeBegin
Surface "bake_direct_irrad" "filename" "area_illum_cyl.ptc"
"displaychannels" "_irradiance"
Translate -1 0 0.5
Rotate -90 1 0 0
Cylinder 0.5 0 1 360
Disk 1 0.5 360
AttributeEnd
WorldEnd
FrameEnd
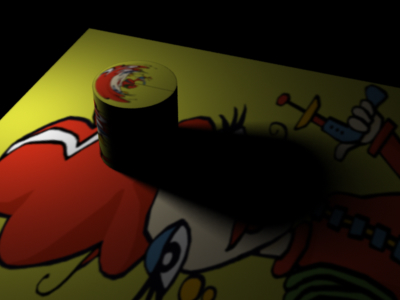
Running this RIB file takes 1.5 minutes (on a 933MHz PC) and renders the following image:
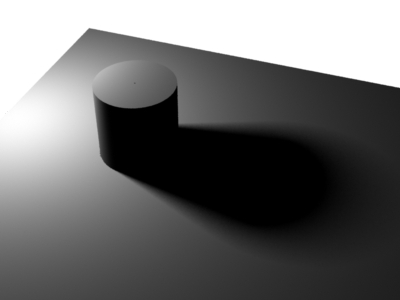 |
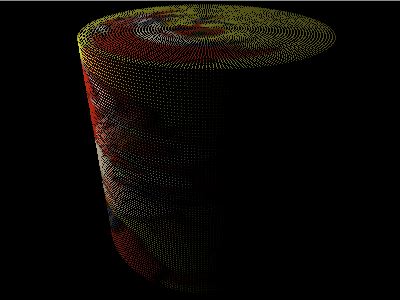
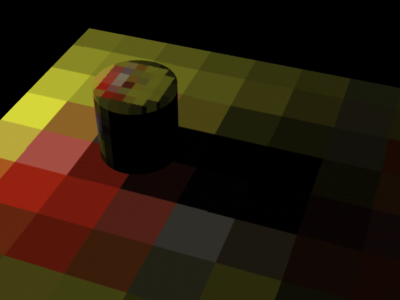
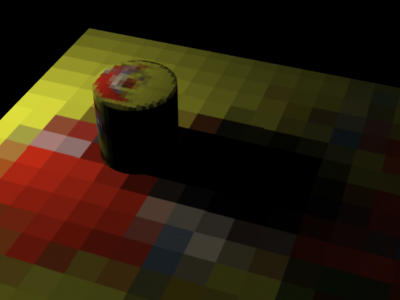
It also generates two point cloud files: “area_illum_plane.ptc” and “area_illum_cyl.ptc”. The point cloud files can be displayed with the ptviewer program.
 |
 |
These two point cloud files contain 169,000 points and 31,000 points and take up 5.4 MB and 1 MB, respectively. (If "interpolate" is set to 0 in the bake3d() call, the resulting point cloud files contain 200,000 and 36,000 points.) The number of points generated can be adjusted by changing either the shading rate or the image resolution.
surface
bake_illumsurfcolor(string filename = "", displaychannels = "", texturename = "";
float interpolate = 1)
{
color irrad, tex = 1, illumsurfcolor;
normal Nn = normalize(N);
/* Compute direct illumination (ambient and diffuse) */
irrad = ambient() + diffuse(Nn);
/* Multiply by surface color */
if (texturename != "")
tex = texture(texturename);
illumsurfcolor = irrad * tex * Cs;
/* Store in point cloud file */
bake3d(filename, displaychannels, P, Nn, "interpolate", interpolate,
"_illumsurfcolor", illumsurfcolor);
Ci = illumsurfcolor * Os;
Oi = Os;
}
The RIB file is similar to the previous example, but with a few related
changes to the surfaces:
FrameBegin 0
Format 400 300 1
ShadingInterpolation "smooth"
PixelSamples 4 4
Display "bake_illumsurf" "it" "rgba"
Quantize "rgba" 255 0 255 0.5
DisplayChannel "color _illumsurfcolor"
Projection "perspective" "fov" 25
Translate 0 -0.5 8
Rotate -40 1 0 0
Rotate 20 0 1 0
Attribute "trace" "bias" 0.0001
WorldBegin
Attribute "cull" "hidden" 0 # don't cull hidden surfaces
Attribute "cull" "backfacing" 0 # don't cull backfacing surfaces
Attribute "dice" "rasterorient" 0 # view-independent dicing !
Attribute "visibility" "int diffuse" 1 # make objects visible to rays
Attribute "visibility" "int specular" 1 # make objects visible to rays
LightSource "spherelight" 1 "from" [-2.8 2 0.5] "radius" 0.2
"intensity" 2 "samples" 64 "falloff" 1
Sides 1 # to avoid flipping normals in "spherelight"
# Ground plane
AttributeBegin
Surface "bake_illumsurfcolor" "filename" "illumsurf_plane.ptc"
"displaychannels" "_illumsurfcolor" "texturename" "irma.tex"
Scale 3 3 3
Polygon "P" [ -1 0 1 1 0 1 1 0 -1 -1 0 -1 ]
"s" [1 1 0 0]
"t" [0 1 1 0]
AttributeEnd
Attribute "visibility" "int transmission" 1 # the cyl. casts shadow
Attribute "shade" "transmissionhitmode" "primitive"
# Cylinder with cap
AttributeBegin
Surface "bake_illumsurfcolor" "filename" "illumsurf_cyl.ptc"
"displaychannels" "_illumsurfcolor" "texturename" "irma.tex"
Translate -1 0 0.5
Rotate -90 1 0 0
Cylinder 0.5 1 0 -360 # reversed to get texture right side up
Disk 1 0.5 360
AttributeEnd
WorldEnd
FrameEnd
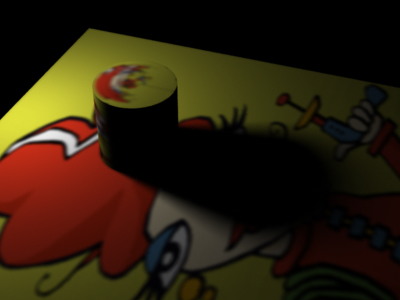
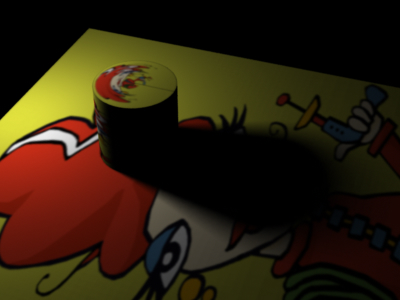
Running this RIB file renders the following image and point clouds:
 |
 |
 |
As in the previous example, the point cloud files contain 169,000 points and 31,000 points, respectively. In these examples, we have chosen to bake into a separate point cloud for for each object. We could also have chosen to bake all points into a single point cloud file.
Shaders execute at the ray hit points if ray tracing is used to compute reflections, refractions, semitransparent shadows, or soft indirect illumination. If the shader calls bake3d() at those hit points (in addition to the regular REYES grid shading points), the point cloud will end up with both regularly spaced points from the REYES shading grids and irregularly scattered points from ray hits. Depending on the curvature of the geometry that shoots the rays, the data points from ray hits will have very different radius values associated with them, and their radii will also be very different from the data points from REYES grids on the same surface.
For some applications, this mix of data points with inconsistent radius values is harmless — or even desirable. However, in most cases we would like to bake data only from the REYES shading grid points. Here is a common and useful idiom to ensure this:
uniform float raydepth = 0;
rayinfo("depth", raydepth);
// Only bake data at REYES grid points; not at ray hit points
if (raydepth == 0) {
bake3d(filename, displaychannels, P, Ns, ...);
}
This precaution is particularly important if we intend to use the point cloud to generate a brick map (as discussed in section 4) since brick map construction works best for point clouds with data points that are regularly spaced and with consistent radii.
ok = texture3d(filename, P, N, "coordsystem", cs,
"direct", d, "onebounce", ob, "occlusion", occ, ... );
If N is (0,0,0), the normals associated with the data points are ignored for the lookups.
surface
read_illumsurfcolor(uniform string filename = "")
{
color illumsurfcolor = 0;
normal Nn = normalize(N);
float ok;
ok = texture3d(filename, P, Nn, "_illumsurfcolor", illumsurfcolor);
Ci = illumsurfcolor * Os;
Oi = Os;
}
The RIB file is the same as when baking, but with a different
surface shader, no light source, and no attributes for culling or
dicing:
FrameBegin 0
Format 400 300 1
ShadingInterpolation "smooth"
PixelSamples 4 4
Display "read_illumsurf" "it" "rgba"
Quantize "rgba" 255 0 255 0.5
Projection "perspective" "fov" 25
Translate 0 -0.5 8
Rotate -40 1 0 0
Rotate 20 0 1 0
WorldBegin
# Ground plane
AttributeBegin
Surface "read_illumsurfcolor" "filename" "illumsurf_plane.ptc"
Scale 3 3 3
Polygon "P" [ -1 0 1 1 0 1 1 0 -1 -1 0 -1 ]
AttributeEnd
# Cylinder with cap
AttributeBegin
Surface "read_illumsurfcolor" "filename" "illumsurf_cyl.ptc"
Translate -1 0 0.5
Rotate -90 1 0 0
Cylinder 0.5 0 1 360
Disk 1 0.5 360
AttributeEnd
WorldEnd
FrameEnd
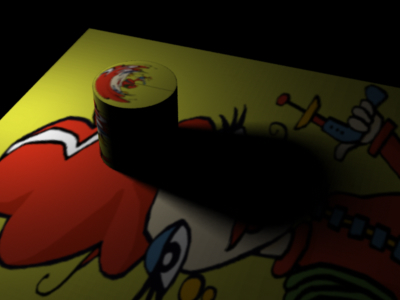
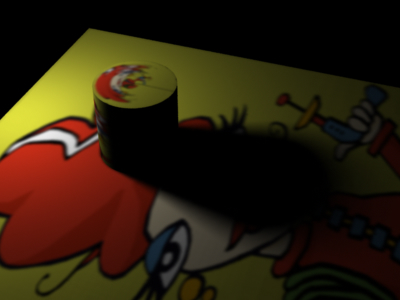
The resulting image looks like this:
 |
Rendering this image is very fast, and it is nearly identical to the image rendered during baking.
(These are the same limitations as for irradiance cache files. Point cloud files are essentially just a more general and flexible version of irradiance cache files.)
A brick map is an adaptive, sparse octree with a “brick” at each octree node. A brick is a 3D generalization of a texture tile; each brick consists of 8^3 voxels with (possibly sparse) data values. The data can be colors, such as diffuse color, specular color, illumination, shadow, etc., and/or floats, such as ambient occlusion, etc. The brick map format is a 3D generalization of Pixar's tiled 2D MIP map texture format for normal 2D textures.
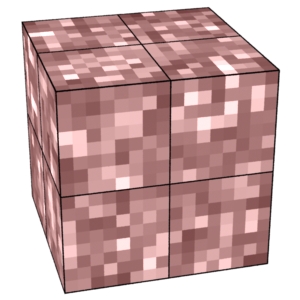
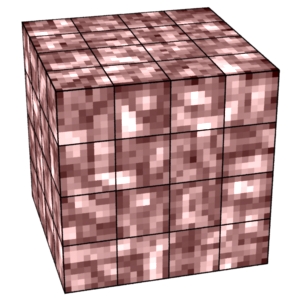
The images below show three levels of a sparse brick map for surface data:
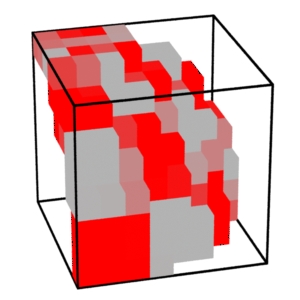 |
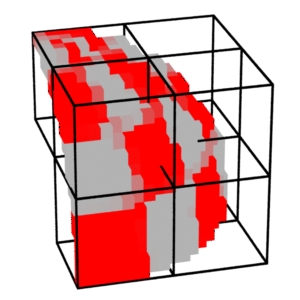 |
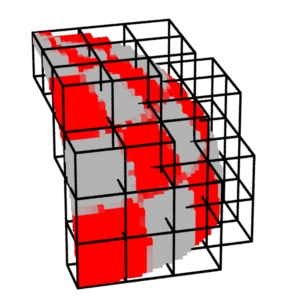 |
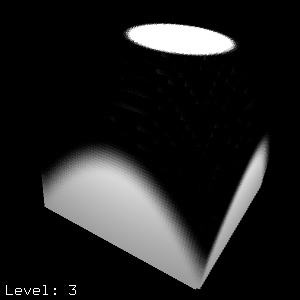
The images below show three levels of a dense brick map for volume data:
 |
 |
 |
The brick map format has several advantages:
brickmake [-maxerror eps] [-maxdepth md] pointcloudfile(s) brickmapfile
For example:
brickmake -maxerror 0.002 illumsurf_plane.ptc illumsurf_plane.bkm
brickmake -maxerror 0.002 illumsurf_cyl.ptc illumsurf_cyl.bkm
For this example, the resulting brick maps contain approximately 4300 and 670 bricks and use 6.2 MB and 1.5 MB, respectively.
Maxerror is a trade-off between precision and file size. Using a negative value for maxerror means that no data will be reduced/compressed. For very small values of maxerror (for example 0.0001) only very uniform data (as on the black side of the cylinder) will be compressed. The default value for maxerror is 0.002 which corresponds roughly to half of 1/255. Maxerror values of 0.001 to 0.01 are good to use in practice for data values in the [0,1] range.
Maxdepth specifies the maximum depth of the brick map octree. The default value is 15, which usually has no effect.
Brick maps can be displayed with the interactive viewing program brickviewer. For example, to display the cylinder brick map, type:
brickviewer illumsurf_cyl.bkm
Here are a couple of screen shots of brickviewer in action. Both
images show level 1 of the cylinder brick map. The left image shows
the default display mode, where the faces of each voxel are shown. The
right image shows the fast display mode where each voxel is shown as
one square facing the screen.
 |
 |
Brickviewer is controlled with the following keys:
ok = texture3d(filename, P, N, "filterradius", r, "coordsystem", cs,
"direct", d, "onebounce", ob, "occlusion", occ, ... );
When the optional parameter "filterradius" is omitted PRMan automatically computes a filter radius that corresponds to the size of a shading micropolygon.
Improved for PRMan 13.0: In PRMan releases prior to 13.0 the data had to be read in the same order as they were baked. This limitation has been eliminated in PRMan 13.0.
In this example we read the brick map generated in the previous section. The surface shader is the same as in Section 3.1. The RIB file is also the same as in Section 3.1, but with the point cloud file names replaced by the brick map file names:
FrameBegin 0
Format 400 300 1
ShadingInterpolation "smooth"
PixelSamples 4 4
Display "read_illumsurf" "it" "rgba"
Quantize "rgba" 255 0 255 0.5
Projection "perspective" "fov" 25
Translate 0 -0.5 8
Rotate -40 1 0 0
Rotate 20 0 1 0
WorldBegin
# Ground plane
AttributeBegin
Surface "read_illumsurfcolor" "filename" "illumsurf_plane.bkm"
Scale 3 3 3
Polygon "P" [ -1 0 1 1 0 1 1 0 -1 -1 0 -1 ]
AttributeEnd
# Cylinder with cap
AttributeBegin
Surface "read_illumsurfcolor" "filename" "illumsurf_cyl.bkm"
Translate -1 0 0.5
Rotate -90 1 0 0
Cylinder 0.5 0 1 360
Disk 1 0.5 360
AttributeEnd
WorldEnd
FrameEnd
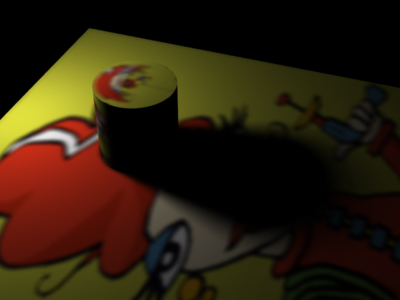
The resulting image looks like this:
 |
Rendering this image takes less than 10 seconds. It is nearly identical to the image rendered during baking.
If, out of curiosity, we are interested in rendering the raw, uninterpolated brick map data, we can set "filterradius" to 0 in the texture3d() calls. The rendered image looks like this:
 |
Upon close inspection it is possible to make out the individual large voxels in regions with smooth color variation. As another example, in the image below the brick maps have been generated with maxerror 0.02 to make the voxels clearer. (These brick maps contain approximately 2300 and 520 bricks and use 2.6 MB and 0.9 MB, respectively.)
 |
Notice that the voxels are large in areas with uniform color and small in regions with sharp details.
The texture3d() parameter "maxdepth" can be used to render using only the top levels of the brick map. The images below are rendered with "filterradius" 0 and "maxdepth" 0 and 1, respectively:
 |
 |
As mentioned previously, PRMan will automatically compute a filter radius that corresponds to the area of a micropolygon. But the filterradius can also be explicitly set in order to blur the lookup results. Filterradius is measured in world space units. The images below show two examples corresponding to "filtersize" 0.03 and 0.1.
 |
 |
It is interesting to note that, although the textures are blurred in most regions, the color contrast across the sharp edge of the cylinder is still sharp. This is because the brick map data are stored in separate octrees depending on the orientation.
Another way of specifying the filter radius is as a multiple of the micropolygon size. If the filterradius is not specified, filterradius values corresponding to the size of the micropolygons are automatically computed. This means that each texture3d() result corresponds to the average texture over the area of the micropolygon. The optional parameter "filterscale" can be used to scale this default filter size; the images below show some examples:
 |
 |
 |
 |
In order to ensure smooth transitions between different lookups (for example in a zoom out of a scene), the lookups can be linearly interpolated between two levels in the brick map. This is specified by setting the optional parameter "lerp" to 1. The default is 0.
When bricks are read by texture3d() they are stored in a cache. The size of the brick cache can be changed with Option "limits" "brickmemory". The size is specified in kB, so to specify a 10 MB cache, use
Option "limits" "brickmemory" 10240The default brick cache size is 10 MB (same as above).
The brick cache size can also be specified in the rendermn.ini file. The syntax is as follows:
/prman/brickmemory 10240
As usual, the option overrides the .rendermn.ini setting if both are specified.
The specified brick cache size is only used as a guideline. The number of cache entries is determined by the cache size and the number of data pr. voxel in the first brick read in. If any of the following bricks have more data pr. voxel, the brick cache entries will be enlarged on-the-fly, and the end result is a brick cache using more memory than specified by the option (or rendermn.ini file). To further confuse the issue, in multithreaded execution there is a brick cache for each thread, so the total brick cache size increases the more threads are used.
Sometimes increasing the brick cache size can speed up rendering significantly. You can determine if this is might be a worthwhile endeavor by inspecting the statistics. The first warning sign is if a significant part of the overall render time is spent in system calls (reading bricks from disk). The second warning sign is if the brick cache capacity miss rate (ie. nBrickCacheCapaMisses / nBrickCacheLookups) is above a few percent. (The brick cache compulsory miss rate, nBrickCacheCompMisses / nBrickCacheLookups, is due to the first read of each brick, and that rate will not change no matter how large the cache is.) The third warning sign is if the brickReadTime statistic is a large fraction of the overall render time. If all three warning signs are seen, there is a good chance that increasing the brick cache size will speed up rendering.
PRMan versions up to and including 12.5.1 used a brick map format that only disambiguated incoherent normals at the finest level of the brick map. This meant that in order to lookup brick map data in regions with incoherent normals (for example due to sharp edges, thin surfaces, or double-sided shading), the lookups always had to go to finest resolution. This ruined the brick cache coherency, caused many brick reads from file, and made the lookups very slow.
As a consequence, double-sided shading had to be avoided when baking data, or one had to store data for the two sides in two separate point clouds and then generate two separate brick maps.
Lookups with large filter sizes were also slow — for example if the object was small on screen compared to when it was baked, or if the 3D texture was being looked up at a ray hit point with a wide footprint. The work-around was to call texture3d() with normal (0,0,0), indicating that the incoherent normals should be ignored, and data from a from a coarse level of the brick map were sufficient. However, the returned data would be the average of data from all directions, so this was not always a satisfying solution.
In PRMan 12.5.2 we have introduced a new and improved brick map format that handles incoherent normals better. Normals are disambiguated at all levels of the brick map. So it is now perfectly fine to bake data from double-sided shading into a single brick map, and data can be looked up with wide filters without either getting very slow reads or data that are mixed from front- and back-sides.
The trick of setting the texture3d() normal to (0,0,0) should no longer be used. The correct surface normal must be used, otherwise the lookups will fail. (If your shaders use the (0,0,0) trick and it is inconvenient to change the shaders to use the correct normal, there is a workaround: use the new brickmake parameter called -ignorenormals. With this parameter, all data are stored in the brick map as if their normal was (0,0,0).)
In this section, we'll bake and lookup volume data: a smoke texture and volume illumination inside a cubic volume. When baking and looking up volume data it is important to use a "null" normal, i.e. N = (0,0,0), to distinguish the data from surface data.
The following volume shader ray marches through a volume and computes a smoke density value at each step. It writes the values out to a point cloud file (as float data):
// Compute turbulent smoke density
float
smokedensity(point Pcurrent; float frequency, octaves)
{
point Pshad = transform("shader", Pcurrent);
point Psmoke = Pshad * frequency;
// Compute smoke texture
float smoke = 0, f = 1, i;
for (i = 0; i < octaves; i += 1) {
smoke += f * noise(Psmoke);
f *= 0.5;
Psmoke *= 2;
}
return smoke;
}
// Bake a volume full of smoke densities
volume
bakesmokevol(string filename = "", displaychannel = "";
float frequency = 1, octaves = 3, depth = 1, steps = 100)
{
point Pfront, Pcurrent;
normal N0 = 0;
vector In = normalize(I);
vector dx = depth/steps * In, offset;
float sd;
uniform float step = 0;
// Compute a start position (jittered in depth)
Pfront = P - depth * In;
offset = random() * dx;
Pcurrent = Pfront + offset;
// March along a ray through the volume
while (step < steps) {
// Compute the turbulent smoke density at Pcurrent
sd = smokedensity(Pcurrent, frequency, octaves);
// Write the 3D texture data point to a point cloud file
bake3d(filename, displaychannel, Pcurrent, N0, "smokedensity", sd);
// Advance one step
step += 1;
Pcurrent += dx;
}
// Use color from last step
Ci = sd;
Oi = 1;
}
In addition to writing the point cloud file, the shader also generates an image of the deepest slice of the smoke (the last assignment to Ci).
The following RIB file renders a 2x2x2 volume and bakes out a dense 3D point cloud file called smokevol.ptc.
FrameBegin 0
Format 200 200 1
ShadingInterpolation "smooth"
PixelSamples 4 4
ShadingRate 4
Display "Baking volume texture data: smoke density" "it" "rgba"
Quantize "rgba" 255 0 255 0.5
DisplayChannel "float smokedensity"
Projection "orthographic"
Translate 0 0 10
WorldBegin
# Atmosphere shader bakes volume texture
Atmosphere "bakesmokevol"
"filename" "smokevol.ptc" "displaychannel" "smokedensity"
"frequency" 5
"depth" 2 "steps" 100
# Back wall -- necessary to execute the atmosphere shader
Surface "constant"
Polygon "P" [-1 -1 1 1 -1 1 1 1 1 -1 1 1]
WorldEnd
FrameEnd
Running this RIB file renders the following image. The image shows the smoke density at the back wall.
 |
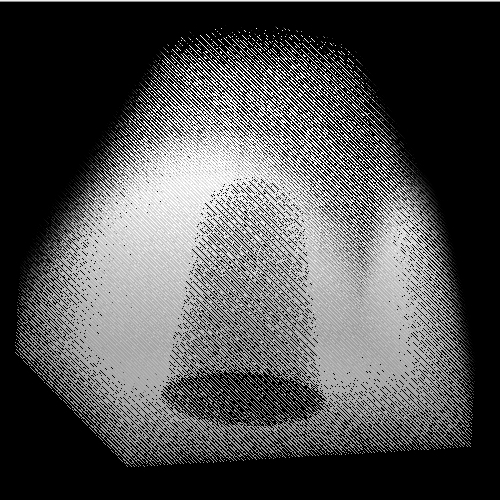
The baked point cloud, smokevol.ptc, has around 1.2 million data points (110x110x100). It is shown below:
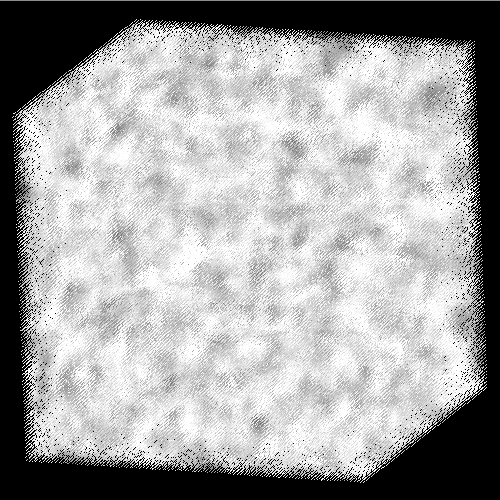 |
In this example, we bake the illumination and shadow in a volume (again using ray marching). The illumination is stored as a color.
volume
bakeillumvol(string filename = "", displaychannel = "";
float depth = 1, steps = 100)
{
color li = 0;
point Pfront, Pcurrent;
normal N0 = 0;
vector In = normalize(I);
vector dx = depth/steps * In, offset;
float smoke;
uniform float step = 0;
// Compute a start position (jittered in depth)
Pfront = P - depth * In;
offset = random() * dx;
Pcurrent = Pfront + offset;
// March along a ray through the volume
while (step < steps) {
// Compute the illumination (including shadows) at Pcurrent
li = 0;
illuminance(Pcurrent) {
li += Cl;
}
// Write the illumination value to a point cloud file
bake3d(filename, displaychannel, Pcurrent, N0, "illum", li);
// Advance one step
step += 1;
Pcurrent += dx;
}
// Use color from last step
Ci = li;
Oi = 1;
}
The RIB file contains a spot light, a sphere casting a shadow, and
a volume.
FrameBegin 0
Format 200 200 1
ShadingInterpolation "smooth"
PixelSamples 4 4
ShadingRate 4
Display "Baking volume illumination" "it" "rgba"
Quantize "rgba" 255 0 255 0.5
DisplayChannel "color illum"
Projection "orthographic"
Translate 0 0 10
WorldBegin
# Light source with ray traced shadows
LightSource "spotlight_rts" 1 "from" [0 2 0] "to" [0 0 0]
"intensity" 2 "falloff" 1
# Sphere casting a shadow
AttributeBegin
Attribute "visibility" "int transmission" 1 # sphere casts shadow
Attribute "shade" "string transmissionhitmode" "primitive" # sphere casts shadow
Surface "constant"
Scale 0.3 0.3 0.3
Sphere 1 -1 1 360
AttributeEnd
AttributeBegin
Attribute "cull" "hidden" 0 # also shade points behind sphere
# Atmosphere shader bakes illumination in volume
Atmosphere "bakeillumvol"
"filename" "illumvol.ptc" "displaychannel" "illum"
"depth" 2 "steps" 100
# Back wall -- necessary to execute the atmosphere shader
Surface "constant"
Polygon "P" [-1 -1 1 1 -1 1 1 1 1 -1 1 1]
AttributeEnd
WorldEnd
FrameEnd
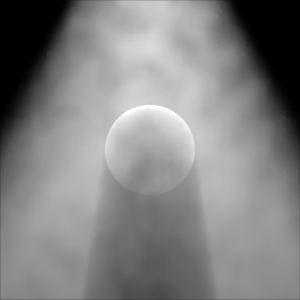
Running this RIB file renders the following image. The image shows the illumination at the back wall, a slice through the spotlight cone. The noise along the edge of the spotlight cone is caused by the random jitter in the ray marching start position.
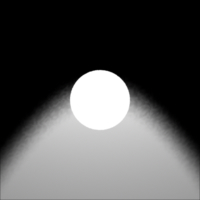 |
The baked out point cloud, illumvol.ptc, has around 1.2 million data points:
 |
In these examples, the volume point cloud was baked from a volume shader in PRMan. It is also possible to generate volume point cloud files using other applications than PRMan via the point cloud file API described in Section 8.
Creating brick maps from volume point clouds is done with 'brickmake' — just as for baked surface data. For example:
brickmake smokevol.ptc smokevol.bkm brickmake illumvol.ptc illumvol.bkm
Here is the brick map of the 3D smoke texture:
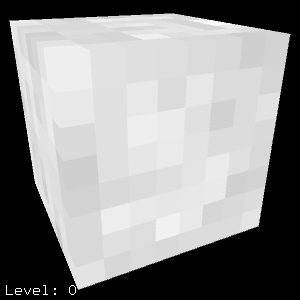 |
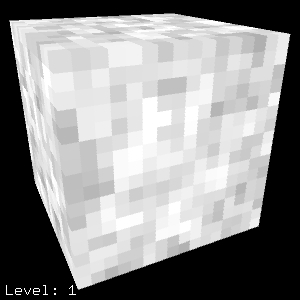 |
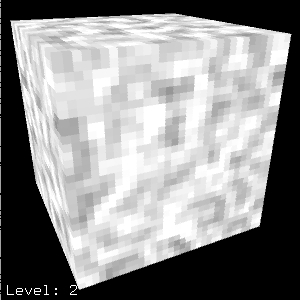 |
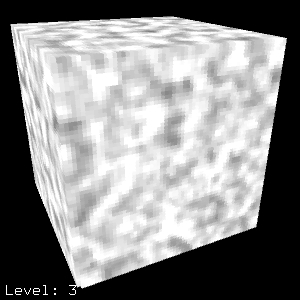 |
And here is the brick map of the volume illumination:
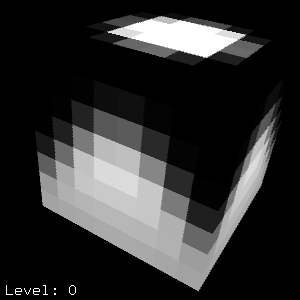 |
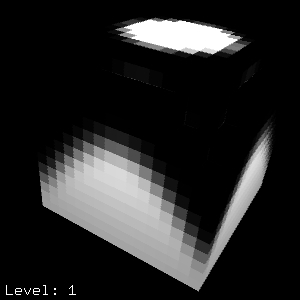 |
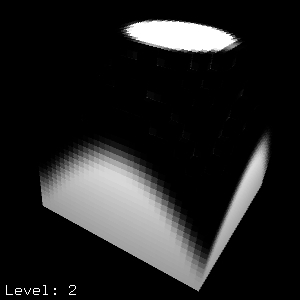 |
 |
volume
readillumsmokevol(string illumfilename = "", smokefilename = "";
float densitymultiplier = 1;
float depth = 1, steps = 100)
{
color Cv = 0, Ov = 0; // accumulated color and opacity of volume
color dCv, dOv; // differential color and opacity
color illum;
point Pfront, Pcurrent;
normal N0 = 0;
vector In = normalize(I);
vector dx = depth/steps * In, offset;
float smokedensity;
uniform float steplength = depth/steps, step = 0;
// Compute a start position (jittered in depth)
Pfront = P - depth * In;
offset = random() * dx;
Pcurrent = Pfront + offset;
// March along a ray through the volume
while (step < steps) {
// Lookup the illumination and the smoke density
texture3d(illumfilename, Pcurrent, N0, "illum", illum);
texture3d(smokefilename, Pcurrent, N0, "smokedensity", smokedensity);
// Accumulate opacity and scattered illumination
dOv = densitymultiplier * smokedensity * steplength;
dCv = illum * dOv;
Cv += (1-Ov) * dCv;
Ov += (1-Ov) * dOv;
// Advance one step
step += 1;
Pcurrent += dx;
}
Ci = Cv;
Oi = Ov;
}
Here's the rib file with the illuminated smoky volume and sphere:
FrameBegin 0
Format 300 300 1
ShadingInterpolation "smooth"
PixelSamples 4 4
Display "Reading volume illumination and smoke density" "it" "rgba"
Quantize "rgba" 255 0 255 0.5
Projection "orthographic"
Translate 0 0 10
WorldBegin
LightSource "spotlight_rts" 1 "from" [0 2 0] "to" [0 0 0]
"intensity" 2 "falloff" 1
# Sphere casting a shadow
AttributeBegin
# Atmosphere shader ray marches through baked illumination and
# smoke density in volume
Atmosphere "readillumsmokevol"
"illumfilename" "illumvol.bkm" "smokefilename" "smokevol.bkm"
"depth" 0.7 "steps" 50
Surface "matte"
Scale 0.3 0.3 0.3
Sphere 1 -1 1 360
AttributeEnd
AttributeBegin
# Atmosphere shader ray marches through baked illumination and
# smoke density in volume
Atmosphere "readillumsmokevol"
"illumfilename" "illumvol.bkm" "smokefilename" "smokevol.bkm"
"depth" 2 "steps" 100
Surface "constant"
# Back wall -- necessary to execute the atmosphere shader
Polygon "P" [-1 -1 1 1 -1 1 1 1 1 -1 1 1]
AttributeEnd
WorldEnd
FrameEnd
The rendered image shows the sphere and illuminated smoky volume.
 |
If both density and illumination were baked into the same brick map, only half as many lookups would be necessary, and the run time would be faster.
In the previous example, reading the baked data is not significantly faster than computing the data from scratch. However, some data are more time-consuming to compute, while the lookup time is independent of how long it took to compute the data to begin with.
We have made the simplification that the illumination does not depend on the smoke density between the light source and the illuminated points. If we wanted to compute more accurate illumination, we must ray march through the volume, looking up smoke densities along the way. There are two ways of doing this: the slow way and the fast way.
The slow way: At each point we wish to compute the illumination, we can ray march through the volume between the light source and the point, accumulating smoke densities along the way. This is an order O(n^2) algorithm, with n being the number of points (more than 1 million in this example).
The fast way: It is much more efficient to change the ray marching direction: ray march from the light source through the volume, accumulating the densities along the way and baking the attenuated illumination. This is an order O(n) algorithm — much more manageable.
The bake3d() and texture3d() functions have a new optional parameter called "cachelifetime". When "cachelifetime" is set, the data points are not written to a point cloud file, but are instead cached in memory. In this case, the "filename" parameter specifies the name of the cache instead of the name of a file. The values of "cachelifetime" can (currently) be "shadinggrid" or "frame".
For "cachelifetime" "shadinggrid", the data are stored in a cache that lives on the shading grid. The cache is cleared when the grid has been shaded. This is mainly useful for sharing common computation results between multiple light source shaders being run to illuminate a surface, or computation results from a displacement shader being reused by a surface shader.
For "cachelifetime" "frame", the data are stored in a kd-tree. The kd-tree is cleared when the rendering of a frame is completed. This caching functionality is intended to replace irradiancecache() "insert" and "query". (We will phase out the irradiancecache() function in a future release.)
The bake3d() and texture3d() "cachelifetime"s should of course be identical for a given cache name.
We may add other cache lifetimes, for example "bucket" or "object", in the future.
Point cloud files can be read and written using the point cloud API. Manipulating point cloud files has many applications — for example: merging point clouds, decimating point clouds, subsurface scattering simulation, and so on.
typedef void *PtcPointCloud;
The following procedures are used for writing a point cloud file: PtcCreatePointCloudFile(), PtcWriteDataPoint(), and PtcFinishPointCloudFile().
PtcPointCloud PtcCreatePointCloudFile(char *filename, int nvars, char **vartypes, char **varnames, float *world2eye, float *world2ndc, float *format);
void PtcWriteDataPoint(PtcPointCloud pointcloud, float *point, float *normal, float radius, float *data);
void PtcFinishPointCloudFile(PtcPointCloud pointcloud);
The following procedures are available for reading an existing point cloud file: PtcOpenPointCloudFile(), PtcGetPointCloudInfo(), PtcReadDataPoint(), and PtcClosePointCloudFile().
PtcPointCloud PtcOpenPointCloudFile(char *filename, int *nvars, char **vartypes, char **varnames);
int PtcGetPointCloudInfo(PtcPointCloud pointcloud, char *request, void *result);
int PtcReadDataPoint(PtcPointCloud pointcloud, float *point, float *normal, float *radius, float *data);
void PtcClosePointCloudFile(PtcPointCloud pointcloud);
All these API function prototypes are defined in the header file pointcloud.h. Compile and link with the following libraries:
libpointcloud.a libtarget.a librib.a libzip.a libprmutil.a
/*
* ptmerge.c
* This program demonstrates how to use the pointcloud API to read
* and write points from/to point cloud files.
*
* The program reads some point cloud files and writes their content
* out as a single point cloud file.
*/
#include "stdlib.h"
#include "stdio.h"
#include "string.h"
#include "math.h"
#include "assert.h"
#include "pointcloud.h"
int
main(int argc, char *argv[]) {
PtcPointCloud *inptcs = NULL; /* an array of PtcPointClouds (pointers) */
PtcPointCloud outptc = NULL;
float w2e[16], w2n[16], format[3];
float point[3], normal[3];
float radius, *data;
int nInFiles = argc-2, f, v;
int datasize, nvars, nv;
int npoints, p;
char *vartypes[256], *varnames[256], *vt[256], *vn[256];
char *inname, *outname;
if (argc < 3) {
fprintf(stderr, "ptmerge error: needs at least one input file and an output\n");
exit(1);
}
inptcs = (PtcPointCloud) malloc(nInFiles * sizeof(PtcPointCloud));
/* Open the first input files to determine data types */
inname = argv[1];
inptcs[0] = PtcOpenPointCloudFile(inname, &nvars, vartypes, varnames);
if (!inptcs[0]) {
fprintf(stderr, "ptmerge error: unable to open input file %s\n",
inname);
exit(1);
}
/* Open following input files (if any) and make sure they have the
same data types as the first */
for (f = 1; f < nInFiles; f++) {
inname = argv[f+1];
inptcs[f] = PtcOpenPointCloudFile(inname, &nv, vt, vn);
if (!inptcs[f]) {
fprintf(stderr, "ptmerge error: unable to open input file %s, skipping it.\n",
inname);
continue;
}
if (nv != nvars) {
fprintf(stderr, "ptmerge error: input files differ number of vars\n");
exit(1);
}
for (v = 0; v < nvars; v++) {
if (strcmp(vartypes[v], vt[v])) {
fprintf(stderr, "ptmerge error: input files differ in data types: %s vs %s\n",
vartypes[v], vt[v]);
exit(1);
}
if (strcmp(varnames[v], vn[v])) {
fprintf(stderr, "ptmerge error: input files differ in data names: %s vs %s\n",
varnames[v], vn[v]);
exit(1);
}
}
}
/* Get transformation matrices and image format from first file */
PtcGetPointCloudInfo(inptcs[0], "world2eye", w2e);
PtcGetPointCloudInfo(inptcs[0], "world2ndc", w2n);
PtcGetPointCloudInfo(inptcs[0], "format", format);
/* Create output file with the same data types as input file(s) */
outname = argv[argc - 1];
outptc = PtcCreatePointCloudFile(outname, nvars, vartypes, varnames,
w2e, w2n, format);
if (!outptc) {
fprintf(stderr, "Unable to open output file %s.\n", outname);
exit(1);
}
PtcGetPointCloudInfo(inptcs[0], "datasize", &datasize);
data = (float *) malloc(datasize * sizeof(float));
/* Loop over the input files, reading all points and writing them to
the output file. */
for (f = 0; f < nInFiles; ++f) {
PtcGetPointCloudInfo(inptcs[f], "npoints", &npoints);
inname = argv[f+1];
printf("input file '%s' has %i points\n", inname, npoints);
for (p = 0; p < npoints; p++) {
PtcReadDataPoint(inptcs[f], point, normal, &radius, data);
PtcWriteDataPoint(outptc, point, normal, radius, data);
}
PtcClosePointCloudFile(inptcs[f]);
}
free(inptcs);
free(data);
/* Finish writing the point cloud data and close files */
PtcFinishPointCloudFile(outptc);
printf("merged file '%s' written\n", outname);
return 0; /* success */
}
The ptmerge program can be invoked with:
ptmerge infile1.ptc infile2.ptc ... outfile.ptc
As another example of how to use the point cloud API, we are here providing source code for subsurface scattering simulation. (This is the same computation done by 'ptfilter -filter ssdiffusion'.)
The main entry point is the function SSDiffusion() which does the following:Be careful about baking at ray hit points! Baking at ray hit points can scatter additional data points in the point cloud, in addition to the regular data baked from REYES shading grids. The additional data points can have widely varying radius values. This is discussed in Section 2.3.
Q: Why don't you add a loop construct in RenderMan Shading Language (SL) that loops over nearby shading points?
A: Only shading points on the same grid would be available during rendering, and this would be of limited use. For example, a shading point on the edge of a shading grid would be missing many of its immediate "neighbor" points.
Q: Why don't you add a loop construct in SL that loops over all nearby points from a point cloud file (baked in a previous pass)?
A: If only points within a specified radius were looped over, this would have limited use: for loops over baked points, one usually wants to not only to loop over the nearby points, but also some coarse representation of more distant points.
Q: Why don't you add a loop construct in SL that loops over both nearby and distant points?
A: For efficiency, the distant points need to be clustered together, otherwise the loops would be extremely slow. The algorithm for computing the coarse clustering representation of distant points depends on the application, so it must be programmable. This is beyond the scope of SL. We believe that for these types of computation, C and C++ are more suitable than SL. Writing a DSO that reads the point cloud (using the point cloud API) and computes a hierarchical representation is much more flexible. The subsurface scattering code in section 8.3 is an example.
PRMan's ambient occlusion and irradiance baking (that also uses point clouds and brick maps) is described in the application note "Ambient Occlusion, Image-Based Illumination, and Global Illumination".
| Pixar
Animation Studios
|